Ohne zu übertreiben kann man glaube ich behaupten, dass der Emax TinyHawk II bzw. TinyHawk II Freestyle mittlerweile zu den beliebtesten kleinen Whoops / Drohnen in der Szene gilt. Und dies – zurecht wie ich finde – nicht nur unter Anfängern. Die gute Verarbeitung, klasse Kamera und die überaus sanften Flugeigenschaften des Copters machen in ideal als 1SVerkürzte Angabe darüber, wie viele Zellen in Serie geschalten in einem LIPO verbaut sind. Jede Zelle (S) hat eine Spannung von 4.2V (geladen) bis 3.2V (entladen). Diese Spannungen werden wegen der Schaltung in Reihe (Serie) miteinander aufsummiert. ein 1S Akku liefert also bis zu 4.2V, ein 2S Akku 8.4V usw. More indoor Spaßmaschine oder 2SVerkürzte Angabe darüber, wie viele Zellen in Serie geschalten in einem LIPO verbaut sind. Jede Zelle (S) hat eine Spannung von 4.2V (geladen) bis 3.2V (entladen). Diese Spannungen werden wegen der Schaltung in Reihe (Serie) miteinander aufsummiert. ein 1S Akku liefert also bis zu 4.2V, ein 2S Akku 8.4V usw. More outdoor Micro QuadEine Drohne mit 4 Motoren More.
Leider wird der TinyHawk per Werk ausschließlich mit FrSky Empfänger geliefert. Viele steigen jedoch recht früh, nicht zuletzt wegen der stabilieren Verbindung und höheren Reichweite, auf TBS Crossfire um.
In diesem Artikel möchte ich kurz und knapp schildern, wie Du einen TBS Crossfire Nano RX Empfänger an den Flight ControllerDer Flight Controller ist ein kleines ( PCB ) Board welches die CPU bzw. MCU und nötige Peripherie beheimatet um die Steuerungssoftware bzw. das Betriebssystem des Multicopters zu betreiben. Als Betriebssystem kommen zumeist Firmwares wie iNAV, Betaflight oder ähnliche Open Source Projekte zum Einsatz. Neben der CPU findet sich auf dem FC üblicherweise auch Peripherie wie Accelerometer, Barometer und dergleichen mehr. More des TinyHawk anlöten und anschließend in Betaflight konfigurieren kannst.
1 – Erst mal ist Basteln angesagt – FC ausbauen
Zunächst müssen wir den Flightcontroller „befreien“. Bitte beachte, dass dieser Arbeitsschritt unterschiedlich ist, je nachdem ob Du einen FinyHawk 2 Freestyle oder die WhoopEin Whoop oder auch Tinywhoop ist ein sehr kleiner Copter, bei dem die Propellergrösse in mm angegeben wird (65mm und 75mm ist ein "Standart") More Variante besitzt. Ich beschreibe hier den Ausbau am WhoopEin Whoop oder auch Tinywhoop ist ein sehr kleiner Copter, bei dem die Propellergrösse in mm angegeben wird (65mm und 75mm ist ein "Standart") More, da ich gerade diesen vor mir habe. Beim Freestyle ist der Ausbau ähnlich einfach jedoch aber nicht identisch.
Gut, der FC muss also raus, damit wir den Receiver an die UART1 (RX1 und TX1) Schnittstelle löten können.
Dazu müssen die Motoren von eben diesem abgesteckt werden. Achte dabei bitte darauf, die Buchsen auf der FC Platine nicht abzureißen. Mein Exemplar kam direkt von Banggood und hatte etwas Heißkleber auf den Buchsen, welcher die Stecker an Ort und Stelle hielt. Dieser muss mit einem kleinen Schlitzschraubendreher vorab entfernt werden, bevor die Stecker der Motoren abgezogen werden können. Die Gefahr, die Stecker samt Buchse abzureißen wird dadurch zwar nicht gebannt, jedoch stark minimiert. Dennoch also sanft und behutsam arbeiten.
Sind die Motoren abgesteckt, entfernen wir mit einem Kreuzschlitz die Bodenplatte, an welcher die Akkus mittels Gummi befestigt werden. Danach muss noch der VTXAbkürzung für -Video Transmitter. Der Videosender in der Drohne welcher das Bild der FPV Kamera an die FPV Brille überträgt. Zu unterscheiden sind analoge und digitale Systeme. More (Videotransmitter) abgesteckt werden.
Wenn Du soweit bist, kannst du den FC, also die gesamte Hauptplatine aus dem Frame abziehen, denn diese wird nur durch kleine Gummiringe gehalten (Softmounting).
2 – Receiver vorbereiten
Der Crossfire Nano RX Receiver wird mit aufgeklebter Antenne und silikonummantelten Litzen geliefert. Wir benötigen folgende Litzen, die wir an beiden Enden vorverzinnen:
- Schwarz (MasseEngl. Abkürzung für den Minuspol bzw. die Masse. (Ground) More / GNDEngl. Abkürzung für den Minuspol bzw. die Masse. (Ground) More)
- Rot (Plus 5V)
- Gelb (TX)
- Weiss (RX)
Anschließend werden die Lötpads auf dem Receiver verzinnt und die Litzen aufgelötet.
3 – RX an TX und umgekehrt verbinden
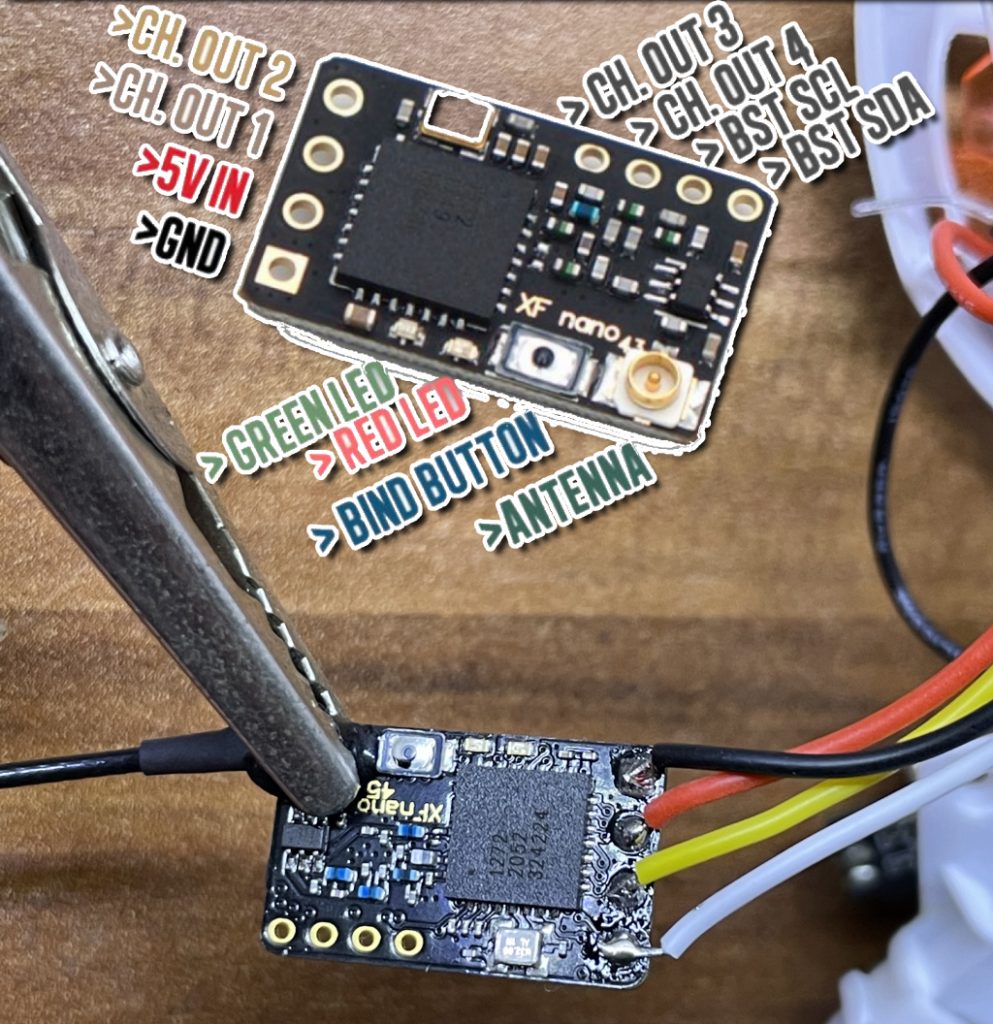
In meinem Beispiel (Bild links) habe ich für CH1 des Receivers, welchen ich als TX konfigurieren werde die gelbe Litze und für RX weiss gewählt.
Ein beliebter Fehler unter Anfängern ist es, die RX Litze des Receivers auf das RX1 Pad des FC’s zu löten. RX steht bei UARTSerielle Kommunikationsschnittstelle. Überträgt Daten bidirektional mittels 3 Litzen (RX, TX, GND). Beim Verbinden zweier Komponenten müssen RX und TX überkreuzt werden. (RX an TX und TX an RX) Häufig wird eine UART Schnittstelle benutzt um Transmitter, Receiver, GPS Module und dergleiche Peripherie an den FC anzuschließen More für den Empfang, TX für das Senden von Daten. Damit der Flight ControllerDer Flight Controller ist ein kleines ( PCB ) Board welches die CPU bzw. MCU und nötige Peripherie beheimatet um die Steuerungssoftware bzw. das Betriebssystem des Multicopters zu betreiben. Als Betriebssystem kommen zumeist Firmwares wie iNAV, Betaflight oder ähnliche Open Source Projekte zum Einsatz. Neben der CPU findet sich auf dem FC üblicherweise auch Peripherie wie Accelerometer, Barometer und dergleichen mehr. More also auf RX1 empfangen kann was der Sender sagt, muss also die TX Litze (gelb) an den RX1 des FCs gelötet, die RX Litze (weiss) wird im Anschluss an den TX1 des Flightcontrollers gelötet.
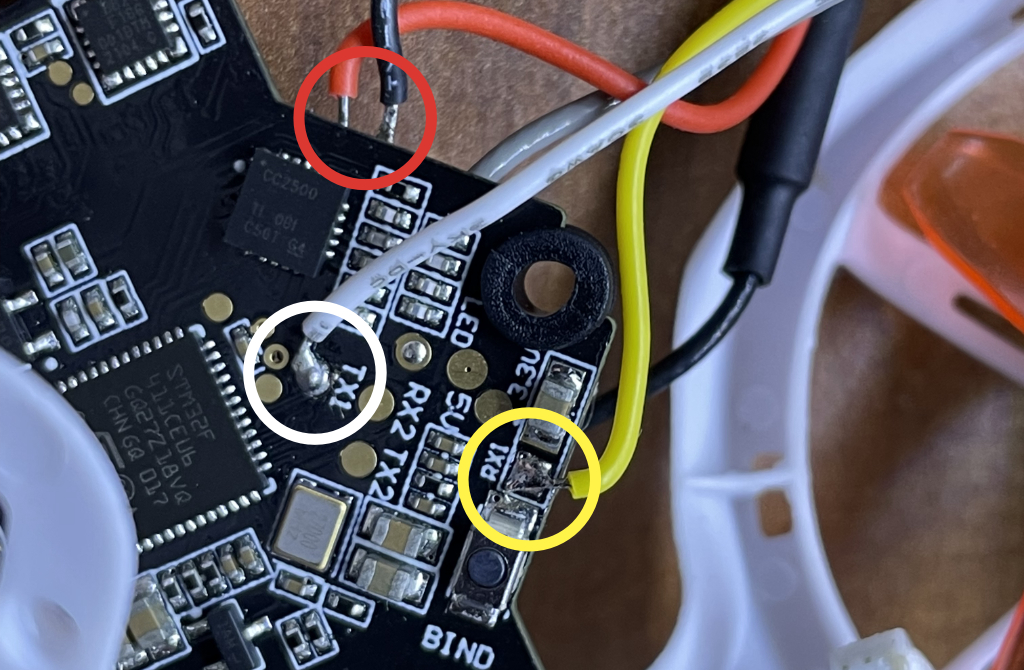
Für die 5V Stromversorgung gibt es mehrere Lötpads, ich habe mich für jene auf der gegenüberliegenden Seite entschieden, da diese direkt nebeneinander liegen. Zwischen RX1 und TX1 auf dem FC befindet sich auch ein 5V Pad, jedoch die MasseEngl. Abkürzung für den Minuspol bzw. die Masse. (Ground) More an anderer Stelle.
4 – Konfiguration in Betaflight
Den richtigen Port und Kommunikationsprotokoll auswählen
In Betaflight müssen nur 2 kleine Einstellungen erledigt oder geprüft werden. Der Port UART1 muss, falls nicht schon erledigt, als „Serial RX“ gewählt / konfiguriert werden. Wichtig zu wissen, es kann nur Einen geben. Sollte also ein anderer Port als Serial RX konfiguriert sein, muss dieser deaktiviert werden.

Ports
Wähle also auf der Seite Ports in Betaflight den UART1 als Serial RX aus. Anschließend das Speichern und neu Starten nicht vergessen! (Save and Reboot)

Configuration
Anschließend noch auf der Seite „Configuration“ etwas nach unten scrollen und den Empfängermodus auswählen. Hier muss der Typ im Pull Down Menü auf „SBUS“ gesetzt und darunter das Protokoll „CRSF“ – kurz für Crossfire – gewählt werden.
Auch hier wieder das Speichern nicht vergessen!
5 – Ergebnis prüfen und Switsches / Kanäle zuweisen
Auf der Seite „Transmitter“ sollten sich nun fleißig die Diagrambalken bewegen, wenn ihr die Sticks und Buttons an der Remote / dem Sender betätigt. Prüfe bitte, ob die Zuordnung wie Throttle und Yaw etc. zu den Balken passend sind. Falls nicht, kann dies in deinem Sender umkonfiguriert werden. Ebenso muss auf der Seite „Modes“ geprüft und angepasst werden, welchen eurer Schalter / Switches ihr für welche Funktion benutzt.
Und wie immer gilt: „Während der Arbeit an Betaflight müssen dringend die Propeller abgenommen werden!“ Der TinyHawk ist gerade der stärkste, schnellste und atemberaubendste Vertreter der FPV Drohnen. Die Propeller können dennoch für schwere Verletzungen sorgen. Also runter mit den Propellern bevor ihr mit der Arbeit beginnt.
Ein weiterer Hinweis – wenn der Transmitter / Sender und Receiver zwar ursprünglich eine Bindung hatten, jedoch kein Akku am TinyHawk angeschlossen ist, kann es sein, dass der Crossfire Nano RX keinen Strom vom FC bekommt. Also Akku anstecken.
